Des Hobby-Eisenbahners höchstes Gefühl ist und bleibt meist eine Führerstandsfahrt. Glück hat, wenn einem die Möglichkeit geboten wird, auf einer echten Lokomotive mitzufahren oder den Zug sogar noch selbst zu steuern. Andernfalls bleibt einem nur das Video einer Führerstandsfahrt oder die Ausbildung zum Lokomotivführer!

Seit der Entwicklung von Mini-Kameras wird dem Modelleisenbahner die Möglichkeit geboten, seine Anlage aus der Perspektive des Lokomotivführers zu erleben – zumindest was das Bild betrifft. Nachdem man beim MECF die ersten Erlebnisse mit einem Kamera-Steuerwagen hatte, ging der Traum weiter und man wollte mit dem Simulator und dem Original-Führerstand dem echten Fahrgefühl noch näher kommen. Seit Inbetriebnahme des Original-Führerstandes im Jahr 2015 durften beim MECF schon viele Hobby-Lokomotivführer in diesen Genuss kommen und den Kamerazug auf der Anlage steuern. Aufgrund des Kilometerstandes auf dem Tacho sind seither über 20'000 Kilometer gefahren worden. Das vor den Führerstand projizierte Grossbild stammt jedoch noch von einer Versuchseinrichtung, bestehend aus einem von einer Elektrolokomotive geschobenen Flachwagen mit Kamera und Mikrosender. Nicht wie bei vielen Aufnahmen von Modellbahn-Führerstandsfahrten, bei denen das Bild von einer Action-Kamera auf der Fahrt gespeichert und später abgespielt wird, muss im vorliegenden Fall die Bildübertragung in Echtzeit erfolgen, was zwangsweise Einbussen in der Bildqualität mit sich bringt. Zwei Nachteile hat die Versuchseinrichtung: Der Zug kann nur in Vorwärtsrichtung verkehren und er ist auf der Anlage ein eher vorbildwidriges Gefährt.

Kamerazug aus den Anfängen. Kamera und Sender sind in einem NPZ-Steuerwagen eingebaut.

Versuchseinrichtung mit Kamera, Stromversorgung, Sender und Akku auf einem Flachwagen.
Re 10/10 als Kameralok
Als Lösung bot sich ein Gespann aus Re 4/4 II und Re 6/6 an (kurz Re 10/10 genannt), mit je einer Kamera an beiden Enden. Zwei Lokomotiven waren notwendig, weil die erforderlichen Komponenten in einer Lokomotive unmöglich Platz hätten. Ein Beiwagen kam nicht in Frage, weil dadurch der freie Einsatz als Lokomotive für beide Fahrrichtungen nicht möglich gewesen wäre.

Gewähltes Konzept: Kameralok mit Re 10/10 und zwei Kameras.
Für den Einbau der Komponenten waren teils grössere Anpassungen an den Lokomotiven erforderlich. So mussten die Antriebe auf den kameraseitigen Drehgestellen ausgebaut werden, was die Zugkraft zwar reduziert, aber grösstenteils durch die Doppeltraktion wieder kompensiert wird. Verschiedene Ausfräsungen waren notwendig, um die elektronischen Baugruppen wie Stromversorgung, Bildumschaltung und Bildübertragung unterzubringen.
Die äusserlichen Eingriffe sind minimal und beschränken sich auf die unscheinbaren Öffnungen für die Kamera in den stirnseitigen mittleren Fensterholmen. Zudem musste auf die Führerstands-Einrichtungen verzichtet werden.
Mechanische Anpassungen
Die engen Platzverhältnisse erforderten im Vorfeld ein genaues Ausmessen der Lok-Modelle. Eine vollständige Zerlegung der beiden Lokomotiven war dazu notwendig und ermöglichte anschliessend auch die Bearbeitung auf der Fräsmaschine. Eine spezielle Herausforderung boten die stirnseitigen Öffnungen für die Kameras, galt es doch, diese so klein und unscheinbar wie möglich zu gestalten.
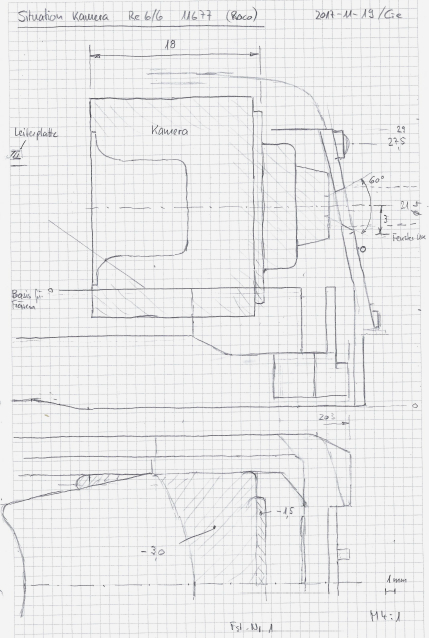
Situationsplan für die erforderlichen Arbeiten am Beispiel des Rahmens der Re 6/6.

Arbeitsskizze für die erforderlichen Arbeiten am Beispiel des Rahmens der Re 6/6.

Nachträgliche Bearbeitung für die Verbindungsleitungen zwischen den Lokomotiven.

Anpassung am Lokgehäuse: Öffnung für die Kamera im Lokgehäuse der Re 420.

Anpassung am Lokgehäuse: Aussparungen für die Video-Verbindungsleitungen im Bereich der Pufferbohle.
Elektrische Anpassungen
Beide Lokomotiven erhielten je einen Decoder, die elektrische Antriebsausrüstung blieb ansonsten unverändert. Auf den bei der Versuchseinrichtung vorhandenen Akku wurde aus Platzgründen verzichtet, dafür sind für eine zuverlässige Stromabnahme die Radkontakte beider Lokomotiven über eine elektrisch leitende Kupplung miteinander verbunden.

Elektro-Schema der beiden Lokomotiven, zusammen mit Stromversorgung und Kamera-Umschaltung (ohne Zusatzschaltung für Stirnlampen-Beleuchtung und Entkuppler).
Da wir noch mit dem „alten“ ZIMO-System unterwegs sind, musste eine Zusatzschaltung entwickelt werden, damit sich die Stirnbeleuchtung vorbildgetreu vom Führerstand aus einstellen lässt.. Die Besonderheit liegt darin, dass nicht wie üblich die Stirnbeleuchtung automatisch mit dem Fahrrichtungswechsel erfolgt, sondern vom bedienten Führerstand abhängig ist. So bleibt bei einer Rückwärtsfahrt die Stirnbeleuchtung vorne erhalten, sofern der Lokführer den Führerstand nicht wechselt. Bei Fahrt als Lokzug ist die Schlussbeleuchtung unten rot, bei angehängten Wagen unten rechts weiss.
Eine Lösung musste für die obere Stirnlampe gefunden werden, weil wegen des Platzbedarfs der Kamera die ursprüngliche Konstruktion mit LED auf der Original-Platine und Lichtleiter keinen Platz mehr fanden. Auf die Stirnlampen-Beleuchtung der innenliegenden Führerstände konnte verzichtet werden, weil diese in der Doppeltraktion stets dunkel sind.
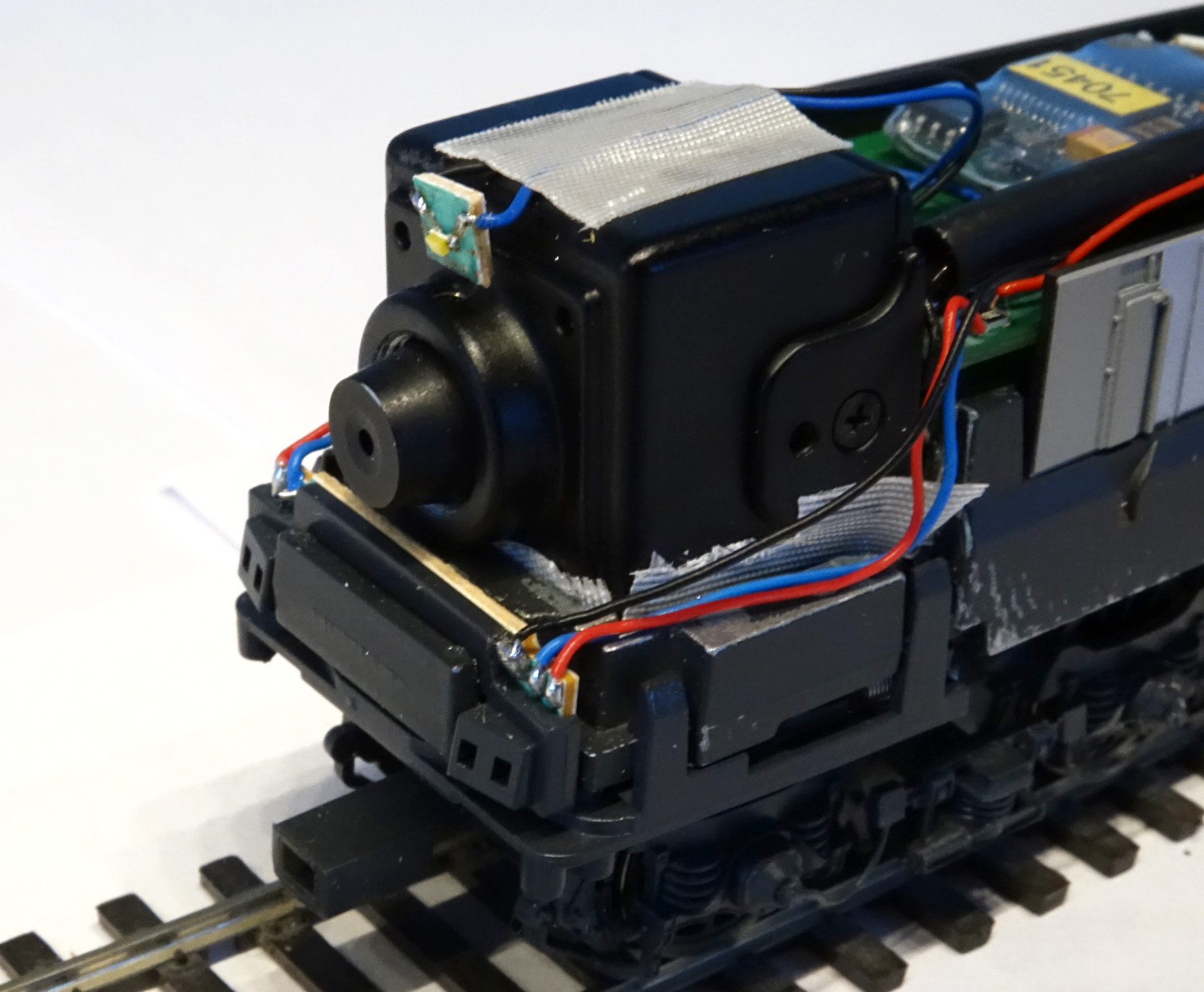
Pinhole-Kamera mit darauf befestigter LED für die obere Stirnlampe. Der Lichtleiter im Lokgehäuse musste gekürzt werden.
Beim „Aufrüsten“ (Einschalten) der Lokomotive auf dem Original-Führerstand wird mit der Wahl des Führerstands am ZUB-Eingabegerät automatisch die passende Kamera eingeschaltet. Bei einer Rückwärtsfahrt bleibt die Sicht nach vorne bestehen, nur bei einem Führerstandwechsel ändert die Blickrichtung. Mit dem Ausklappen des Rückspiegels (Schaltleiste beim Fusspedal) wird auf die Kamera des hinteren Führerstandes umgeschaltet, was einen kurzen Blick nach hinten erlaubt.
Über das Digitalsystem werden in den Lokomotiven das Video-Signal und die Kamera-Speisung umgeschaltet. Die dafür erforderliche Schaltung wurde in das im Eigenbau entstandene Stromversorgungsmodul integriert, welches die 12 V für die Kameras und die 6 V für den Sender zur Verfügung stellt und zusammen mit dem Sender in der Re 6/6 untergebracht ist.

Innenleben der Re 4/4 II mit Original-Platine, Decoder mit Zusatzplatine (Mitte) und Kamera (rechts).

Innenleben der Re 6/6 mit abgeschnittener Original-Platine, Kamera (links), Decoder mit Zusatzplatine (Mitte), Sender (rechts) und Versorgungsmodul (neben der Kamera, unter der Original-Platine).

2,4 GHz PLL Sender mit Kurzantenne.

Rechts des Motors das „freigelegte“ Stromversorgungsmodul für Kamera und Sender mit Umschaltrelais für die Kamera.
Die abgeschirmte, elektrische Verbindung zur Kamera in der Re 4/4 II erfolgt über einen zusätzlichen 4-poligen Stecker, welcher auf die elektrisch leitenden Kupplung montiert ist. Die beiden Lokomotiven bleiben normalerweise fest gekuppelt.

Elektrische Verbindungsleitungen zwischen den Lokomotiven mit leitender Kupplung für die Stromabnahme und Zusatzstecker für das Videosignal.
Entkupplungs-Einrichtung
An den Stirnseiten sind die Lokomotiven mit Kadee-Kupplungen ausgerüstet, ergänzt mit einer Entkupplungsvorrichtung von precimodels (www.precimodels.com). Das System arbeitet mit einem kleinen Motor, der über einen Faden die Klaue öffnet. Für den Einbau waren zusätzliche Bearbeitungen an den Lokomotiven erforderlich.

Entkuppler-Motor am nachgearbeiteten Drehgestell

Nacharbeit am Chassis Re 6/6.

Der im eingebauten Zustand nicht mehr sichtbare Entkuppler-Motor an der Re 4/4 II.

Eingebaute Entkupplungsvorrichtung in der Grundstellung...

...und im aktivierten Zustand.

Zusatzplatine für die vorbildgetreue Stirnlampenbeleuchtung und die Ansteuerung des Entkupplers.
Erwärmung
Die nicht zu unterschätzenden Ströme für Kamera (70 mA) und Sender (70 mA) erzeugen eine Erwärmung bei der in der Lokomotive untergebrachten Stromversorgung. Um sicherzustellen, dass keine unzulässigen Temperaturen beim geschlossenen Gehäuse entstehen, wurden thermografische Infrarot-Temperaturmessungen durchgeführt.

Thermografie-Aufnahme und Temperaturverlauf an den Komponenten der Stromversorgung.
Vom Video-Funksignal zur Leinwand-Projektion
Eine 4-fach Antenne empfängt das Video-Funksignal von der Kamera-Lok. Durch die automatische Umschaltung auf die Antenne mit dem besten Empfangssignal werden Bildverzerrungen eliminiert, die bei 2,4 GHz Signalen von bewegten Objekten in geschlossenen Räumen durch Interferenzen entstehen.

In die Bergspitze integrierte 4fach Empfangsantenne.
Nachdem über einen Rechner die Informationen zu Distanz und Fahrbegriff bei Annäherung an das nächste Signal eingeblendet werden, wird das Bild über Rückprojektion auf die Leinwand vor dem Führerstand projiziert.

Original-Führerstand mit Leinwand.
Fazit
Obwohl sich an der Sicht bei einer Führerstandsfahrt grundsätzlich nichts geändert hat, wird es spannender, wenn neu zum Beispiel bei einem Lokwechsel im Kopfbahnhof der Führerstand gewechselt werden muss – eben wie beim Original mit entsprechendem Blickwechsel. Zudem hat es der Anlagenbetrachter nicht mehr so leicht herauszufinden, welche Lokomotive oder welcher Zug vom Lokführer aus dem Führerstand gesteuert wird, dafür wird das Gesamtbild nicht mehr durch ein vorbildwidriges Gefährt gestört.

Die fertige Kameralok vor einem schweren Güterzug auf der Anlage des MECF...

...und der entsprechende Ausblick des Lokführers aus dem Original-Führerstand.
Verbesserungspotential liegt nach wie vor in der Bildqualität auf der grossen Leinwand. Es bleibt zu hoffen, dass zukünftig weiterentwickelte Kamera- und Bildübertragungssysteme auf den Markt kommen, mit denen sich die Bildqualität verbessern lässt.
Materialliste
Die Hauptkomponenten für die Kameralok sind:
- 1 Lokomotive Re 4/4 II, von Roco
- 1 Lokomotive Re 6/6, von Roco
- 2 Mini-Kameras SQ-3007-P1, 7500 850385 von VTQ
- 1 GigaLink Mikro PLL Sender 6V, 7502 011011 von VTQ
- 1 Stromversorgung (6V, 12V) mit Video-Umschaltung, (Eigenbau)
Als stationäres Empfangsgerät wird verwendet:
- 1 ProfiLink Diversity Empfänger System 2,4 GH, 7512 070620 von VTQ
Bemerkungen zu Kamera und Funkübertragungssystem:
- Kameras und Funkübertragungssystem stammen von VTQ (www.vtq.de)
- Für die Kameras wurde eine Pinhole-Ausführung gewählt, also ohne Linsensystem. Vorteil dabei ist die kleine erforderliche Öffnung in der Führerstandsfront bei guter Tiefenschärfe.
- Für die Bildübertragung wird ein analoges Video-Signal (PAL) mit 2,4 GHz Funksystem verwendet, weil die Verzögerungen bei WLAN-basierten Systemen störend wirken und auch kein geeignetes System auf dem Markt ist, für welches bei der geforderten Qualität der vorhandene Einbauraum genügen würde.
- Bei bewegten Objekten und geschlossenen Räumen treten Übertragungs-Interferenzen auf, die je nach Lage und Situation zu Bildverzerrungen führen. Aus diesem Grund wird das relativ teure Diversity Empfänger System mit 4 Antennen eingesetzt, welches bei schlechten Empfangssignalen automatisch auf die Antenne mit bestem Signal umschaltet.